
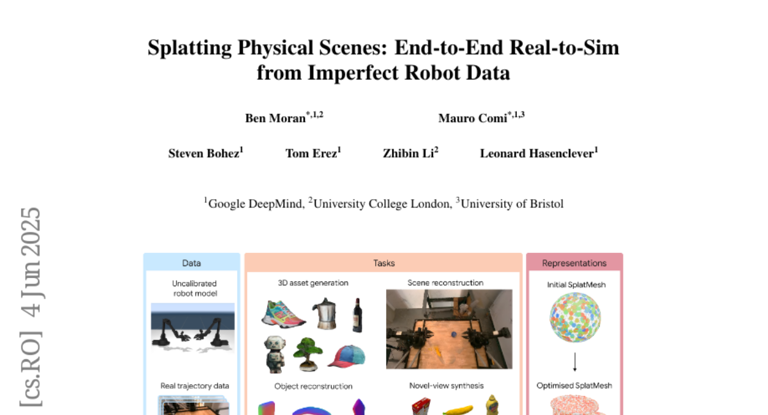
这项由谷歌DeepMind的本·莫兰(Ben Moran)、毛罗·科米(Mauro Comi)等研究人员领导的创新研究,于2025年6月发表在人工智能顶级学术期刊上。有兴趣深入了解的读者可以通过论文编号arXiv:2506.04120v1获取完整研究内容。这项研究团队还包括来自伦敦大学学院和布里斯托大学的专家学者,代表了当前机器人学习领域的前沿探索。
想象一下,你刚搬进一个新家,想要制作一个精确的室内布置图,但你只有一部手机摄像头,而且拍摄时手还在微微颤抖。更麻烦的是,家里的宠物不停地在镜头前跑来跑去,让画面变得混乱。这就是现实世界中机器人面临的挑战——它们需要从不完美、嘈杂的感知数据中理解和重建周围的世界。
传统的方法就像要求一个新手摄影师必须使用专业设备和完美的拍摄条件才能工作。但现实中,大多数机器人都是"业余选手",它们的传感器并不完美,动作也不够精确,周围环境更是千变万化。这就好比你试图用一台老旧的相机在昏暗的房间里给不停动来动去的孩子拍照——结果往往是模糊不清的。

这项突破性研究提出了一个全新的解决方案,就像给机器人配备了一双"魔法眼睛"。这双眼睛不仅能看到表面现象,还能透过混乱的表象理解物体的真实形状、位置和物理特性。更神奇的是,它能将这些理解转化为一个完美的虚拟世界,让机器人可以在其中安全地练习和学习,就像飞行员在模拟器中训练一样。
研究团队的核心创新在于开发了一种名为"SplatMesh"的混合表示方法。如果我们把传统方法比作用积木搭建房子,那么SplatMesh就像是用可塑橡皮泥来塑造——它既能保持物体的基本骨架结构,又能精确地描绘表面的每一个细节。这种方法的巧妙之处在于,它能同时处理物体的几何形状(就像房子的框架)和视觉外观(就像房子的装修和色彩),而且这两者是紧密关联的,一个改变时另一个也会相应调整。
更令人惊叹的是,整个系统采用了端到端的优化策略。这就像一个超级智能的室内设计师,它不仅能看懂你粗糙的手绘草图,还能自动纠正测量误差,补充缺失的细节,最终生成一套完美的装修方案。在机器人的世界里,这意味着系统能同时校准机器人的动作误差、修正相机的位置偏差,并重建出精确的物体模型。